Current projects
ANR project OrigaBot (Origami-based Reconfigurable Robots for Multi-modal Locomotion) 2019 - 2022

Past projects
- European project CURVACE (ICT-FET Open): Artificial compound eyes
- Principal investigator of the ANR project IRIS (Intelligent Retina for Innovative Sensing)
- Project ANR ROBOTEX ROBOTEX : Implementation of a flying arena for robots
- Project ANR EVA (Autonomous Entomopter) EVA
European project CURVACE (Curved Artificial Compound Eyes)
- Senior representative of 2 french laboratories: Institut des Sciences du Mouvement ISM et Centre de Physique des Particules de Marseille CPPM
- Supervisor of the PhD thesis of Raphaël Juston on the retinal micro-movement applied to an artificial compound eye and stabilization in hover
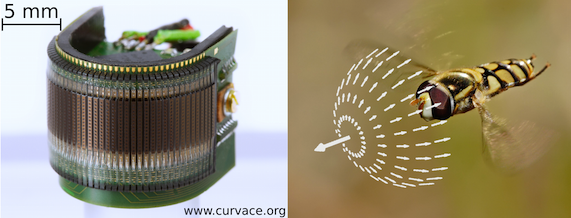 (Left) CurvACE, the first artificial compound eye able to measure, like a flying insect, the apparent velocity of objects as they move across the panoramic eye (right).
(Left) CurvACE, the first artificial compound eye able to measure, like a flying insect, the apparent velocity of objects as they move across the panoramic eye (right).
ANR project IRIS (Intelligent Retina for Innovative Sensing)
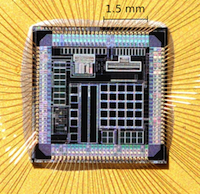 APIS retina (Photo S. Viollet)
APIS retina (Photo S. Viollet)
Project ANR ROBOTEX ROBOTEX
- Principal investigator in charge of the implementation of a big flying arena : 8m x 8m x 6m (height) including 17 VICON cameras (T40S) for the 3D localization of flying robots
- Co-supervisor with Nicolas Marchand (Gipsa-lab) of the PhD thesis of Augustin Mannecy : Stabilisation in hover based on a gaze-control system
- Augustin Manecy developed a brand new rapid prototyping tool to program Linux-based embedded target (Gumstix) from the Matlab/Simulink environment : RT-MaG toolbox
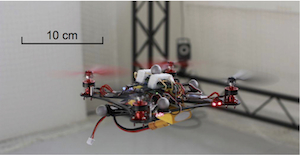 X4-MaG quadrotor developed by ISM (Marseille) and Gipsa-Lab (Grenoble) (Picture: A. Manecy)
X4-MaG quadrotor developed by ISM (Marseille) and Gipsa-Lab (Grenoble) (Picture: A. Manecy)
Project ANR EVA (Autonomous Entomopter) EVA
- Design and realisation of a miniature optic flow sensor with auto-adaptive pixels
- Co-supervisor with Franck Ruffier (ISM) of the PhD thesis of Frédéric Roubieu: Pilotage automatique bio-inspiré pour aéroglisseur (robot LORA)
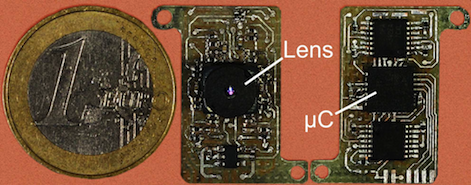 Optic flow sensor (Roubieu et al. 2011)
Optic flow sensor (Roubieu et al. 2011)
