The useful field
of view in driving
Daniel R. Mestre
Movement &
Perception Laboratory (LMP)
University
Aix-Marseille & CNRS
E-mail : mestre@laps.univ-mrs.fr
Web : www.laps.univ-mrs.fr
In
1968, Burg reported the results of a large-scale study, involving visual
measurements in Californian drivers. To
provide driver-licensing administrators with here-to-fore unavailable
information on which to establish effective vision-screening procedures for
driver license applicants, a number of visual performance, personal, and
driving habit characteristics of some 17,500 volunteer California driver
license applicants were compared with their 3-year driving records (accidents
and convictions). Of all the visual tests, dynamic visual acuity
was most closely and consistently correlated with driving record, followed by static
acuity, field of view, and glare recovery. All relationships were in the "expected" direction,
i.e., poor vision was associated with poor driving records. We want here to
spend some time presenting data on the concept of field of view, and more
precisely the useful field of view.
The concept of useful field of view
The useful
field of view (UFOV) is defined as the visual area from which information can
be acquired without moving the eye or turning the head (Ball et al.,
1988). The concept of UFOV was
developed from more classical perimetric studies of the visual field in humans.
A number of reports argued for a reduction in the size of the visual field as a
function of age. However, perimetric
tests of the visual field (figure 1), although efficient diagnostics of disease,
underestimate the degree of difficulty experienced by visually healthy older
adults in everyday activities requiring the use of peripheral vision.
Figure 1. The complete visual field in humans, extending more than 180 degrees in the horizontal dimension. The fovea is the area (about 3 deg in diameter) in which visual acuity is highest. The parafovea (about 10 deg) is the zone is which some pre-processing of visual inputs (like during reading) occurs. The rest of the visual field is called peripheral (low visual acuity, good temporal resolution)
In order to develop a more functional approach, a model incorporating the effects of peripheral distractors and secondary tasks on a primary foveal task demands was developed (Ball et al., 1988). Subjects responded to dual tasks, one central, one peripheral (10 to 30 deg in eccentricity). Using such methodology, experimental studies demonstrated that the size of the UFOV was more flexible than the physiologically determined size of foveal and parafoveal zones. The size of the UFOV is inversely correlated to the foveal task demand, is related to accident risk experienced notably by elderly drivers, in which its size is reduced, as compared to young drivers (Ball et al., 1993). It is also sensitive to (expending with) driving expertise (Crundall et al., 1999).
OPTIC
FLOW
In the
logic presented above, researchers try to evaluate the size of the useful field
of view, with reference to the observer's central point of fixation. However,
we wish to mention here that there are reasons to suspect that the direction of
gaze, while driving, is an important matter in itself. More precisely, this
question refers to an important ongoing debate in the scientific community:
Where do you look when you drive? (Land & Lee, 1994).
This
problem brings us back to the approach to the problem of the visual basis for
the control of locomotion, formalized by Gibson (1979), who introduced the
concept of optic flow, to describe the transformations of the
optic array projected onto the entire retina during self-motion. In an "interactionnist" approach,
he suggested that our motion through the environment produces a pattern of
optic flow, which specifies the properties of our displacement (figure 2).
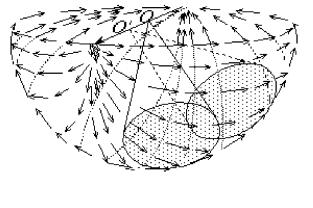
Figure 2. The optic flow field is described as a two-dimensional motion field, specifying the direction of travel of the observer (O), here parallel to the ground surface. Gibson proposed that the information was present everywhere in the optic flow field (i.e. irrespective of the moving observer's direction of gaze).
In the
90's, Warren and collaborators (Warren et al., 1988, 1991) demonstrated that
heading perception from optic flow accuracy was of the order of 1 degree for
both rectilinear and curvilinear paths of self-motion. The main thesis,
originating from Gibson himself, was that perception relied on the global optic
flow pattern.
However,
Land and Lee (1994) showed that, in curve negotiation, the eyes tend to fixate
the inside edge of the road near a point known as the "tangent" or
"reversal" point of the road, which is a point where the inside of
the curve changes direction (Figure 3).
This suggests that subjects pick up useful information there.
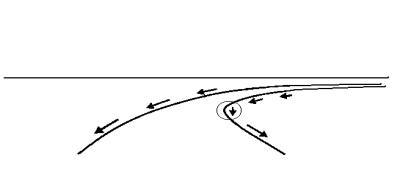
Figure 3. While
negotiating a curve, drivers tend to fixate a region (circled) where the inside
edge of the road changes direction.
This is also the point where the horizontal component of the optical
motions of the road markers changes direction (from leftward to rightward in
this case).
EXPERIMENTAL
WORK
Within
this framework, we set up an experimental study, aimed at evaluating the
ability of (young) human observers to perceive their direction of travel from
optic flow patterns, as a function of their direction of gaze in a virtual
environment. We simulated curvilinear self-motion inside a simple toric surface
(figure 4). Using random-dot optic flow stimuli of brief duration and a
two-alternative forced-choice adaptive procedure, we evaluated curvature
discrimination thresholds in healthy volunteers, as a function of the direction
of gaze.
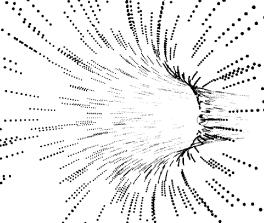
Figure
4. Time-exposure slide, representing the optic flow that subjects experienced
during testing. The superimposed circle represents the tangent point of the
random-dot tunnel. At the tangent point, the optical velocity is null, whenever
the trajectory of the observer is perfectly aligned with the tunnel. In the
experiment, subjects had to detect the situation where their radius of
self-curvature was higher than the (constant) radius of the tunnel.
Results
clearly indicate that curvature discrimination thresholds are always minimal
when subjects' direction of gaze is aligned with the tangent point. As the
direction of gaze goes towards eccentric parts of the optic flow field
(relative to the tangent point), thresholds increase significantly. The pattern
of evolution is coherent with a local analysis of optic flow velocities (figure
5).
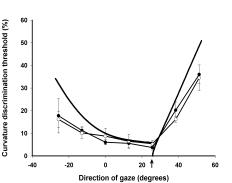
Figure 5. Curvature discrimination thresholds (expressed as a
percentage of the tunnel's radius of curvature) in two observers, as direction
of gaze departures from the tangent point of the driving environment (vertical
arrow). The bold line represents the outcome of a model predicting
discrimination thresholds from local velocity discrimination in foveal vision.
CONCLUSION
The present
results show that the visual perception of the spatial characteristics of
self-motion is not equally precise throughout the visual field. They indicate
that spontaneous gazing strategies observed during driving might correspond to
an optimal selection of useful information in the optic flow field. We believe
that such data could be beneficially incorporated in current approaches of the
useful field of view. In other terms, current approaches of the useful field of
view evaluate peripheral processing of visual input in egocentric terms (i.e.
relative to a "foveal" task). Here, we show that the direction of
gaze itself (i.e. the location of the fovea) of the moving observer is
dependant on the structure of the optic flow field, being dependant itself on
the environmental structure. There are thus egocentric and exocentric
determinants of the useful field of view. This approach to the problem of the
driver's dynamic visual environment might have implications, concerning not
only the evaluation of driving performance in different populations, but also
the architecture of the driver's visual environment for safe driving. For
instance, highway engineers might want to avoid attracting the driver's gaze
toward eccentric zones of the dynamic visual environment.
ACKNOWLEDGMENTS.
This
research was supported by CNRS and by a grant from the Ministry of Research and
Technology (PREDIT 98 T 0018).
REFERENCES
Burg, A.
(1968). Vision and driving: A summary of research findings. Highway Research
Record, Number 216, 1-12.
Hills, B.L.
(1980). Vision, visibility and driving. Perception, 9, 183-216.
Warren, W.H., Mestre, D.R., Blackwell, A.W. & Morris,
M.W. (1991). Perception of circular heading from optical flow. Journal of
Experimental Psychology: Human Perception and Performance, 17, 28-43.